Nonlinear Least-Squares
The nonlinear least-squares problem generalizes the linear least-squares problem to include nonlinear residual functions. The Gauss-Newton solves this problem as a sequence of least-squares subproblems.Nonlinear residuals
The nonlinear least squares problem seeks to minimize the sum of squares
where the -vector of residuals
is composed of differentiable nonlinear functions . The non-linear least squares problem reduces to linear least-squares when is affine, i.e., for some -by- matrix and -vector of observations .
Linearizing the residual
We can solve non-linear least squares problem (1) by solving a sequence of linear least-squares problem, which result from linearization of at the current estimate of the ground truth .
The linear approximation of at a point is defined by
where
is the Jacobian of evaluated at
Algorithm: (Gauss-Newton method)
Choose a starting
for
linearize at to define
solve linear least-squares problem
update iterate: for some
Here's a basic version of the method that takes as arguments the residual and Jacobian functions r and J, and a starting vector x.
function gauss_newton(r, J, x; ε=1e-4, maxits=30)
err = []
for i = 1:maxits
rk, Jk = r(x), J(x)
push!(err, norm(Jk'rk))
err[end] ≤ ε && break
x = x - Jk\rk
end
return x, err
endThe condition err[end] ≤ ε causes the iterations to terminate when the latest residual rk is nearly orthogonal to all the gradients of the residual, i.e., the residual is orthogonal to the tangent space of the level-set for the nonlinear least-squares objective . This is exactly analogous to the optimality condition for linear least-squares.
Example: Position estimation from ranges

Let represent the unknown position of an object. Our aim is to find the position of this object relative to a set of beacons placed in fixed known positions , . The only data available are range measurements that give an estimate of the distance between each beacon and the object at , i.e.,
where each scalar represents the error between the true (and unkown) distance and the measurement .
We can obtain an estimate of the object's position by solving the nonlinear least-squares problem (1) where we define the th residual between the reported distance and the distance between the position of the th beacon and :
Here's the residual function, which takes a vector of ranges and a vector of positions b:
r(x, δ, b) = [ δ[i] - norm(x - b[:,i]) for i in 1:length(δ) ]Use the following Julia packages for this example.
using Random
using Statistics
using LinearAlgebra
using ForwardDiff
using PlotsWe simulate data by placing m beacons in random locations:
m = 13 # number of beacons
b = 2rand(2, m) .- 1 # place beacons uniformly in the unit box
x = zeros(2) # true position
x0 = 2rand(2) .- 1 # initial guess of the unknown position
ν = .5*rand(m)
δ = [ norm(x - b[:,i]) + ν[i] for i in 1:m]Place these items on a map (we'll wrap this in a function so that we can reuse it below):
function plotmap(b, x, x0)
scatter(xlim=(-1,+1), ylim=(-1,+1), leg=:outertopright,frame=:box, aspect_ratio=:equal)
scatter!(b[1,:], b[2,:], label="beacons", shape=:square, ms=7)
scatter!(x[1,:], x[2,:], label="true position", shape=:xcross, ms=7)
scatter!(x0[1,:], x0[2,:], label="initial guess", c="yellow", ms=7)
end
plotmap(b, x, x0)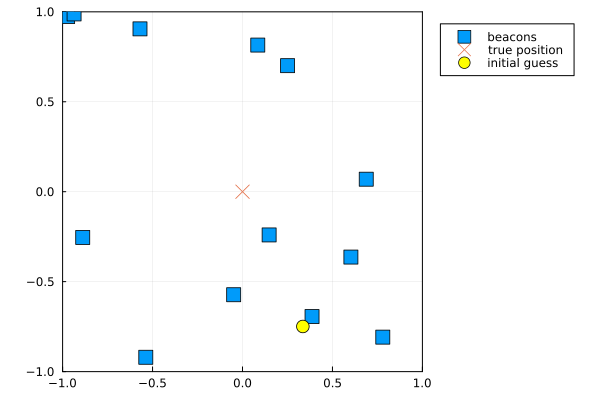
J(x) = ForwardDiff.jacobian(x->r(x, δ, b), x)
xs, err = gauss_newton(x->r(x, δ, b), J, x0)
plot(err, yaxis=:log)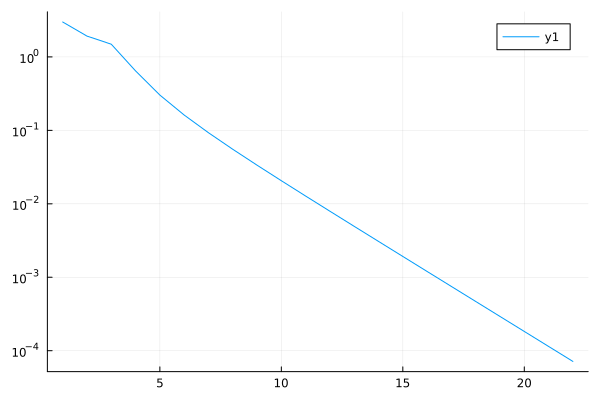
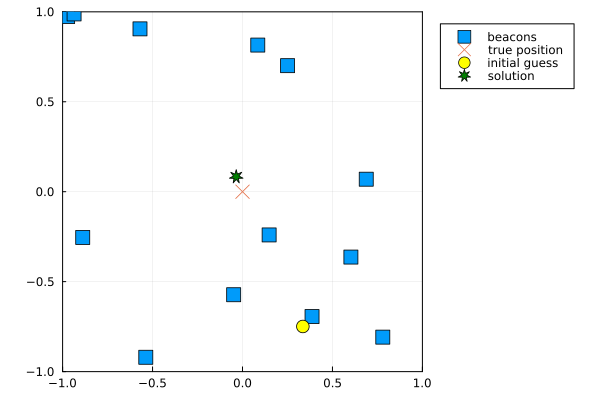
Plot the original map and overlay the obtained solution:
plotmap(b, x, x0)
scatter!(xs[1,:], xs[2,:], label="solution", shape=:star7, c="green", ms=7)