Scaled Descent
CPSC 406 – Computational Optimization
Scaled descent
\[ \def\argmin{\operatorname*{argmin}} \def\argmax{\operatorname*{argmax}} \def\Ball{\mathbf{B}} \def\bmat#1{\begin{bmatrix}#1\end{bmatrix}} \def\Diag{\mathbf{Diag}} \def\half{\tfrac12} \def\int{\mathop{\rm int}} \def\ip#1{\langle #1 \rangle} \def\maxim{\mathop{\hbox{\rm maximize}}} \def\maximize#1{\displaystyle\maxim_{#1}} \def\minim{\mathop{\hbox{\rm minimize}}} \def\minimize#1{\displaystyle\minim_{#1}} \def\norm#1{\|#1\|} \def\Null{{\mathbf{null}}} \def\proj{\mathbf{proj}} \def\R{\mathbb R} \def\Re{\mathbb R} \def\Rn{\R^n} \def\rank{\mathbf{rank}} \def\range{{\mathbf{range}}} \def\sign{{\mathbf{sign}}} \def\span{{\mathbf{span}}} \def\st{\hbox{\rm subject to}} \def\T{^\intercal} \def\textt#1{\quad\text{#1}\quad} \def\trace{\mathbf{trace}} \def\xbar{\bar x} \]
- conditioning
- scaled gradient direction
- Gauss Newton
Zig-zagging
Consider the quadratic function with \(H\) symmetric and positive definite \[ f(x) = \frac{1}{2} x\T H x, \qquad H = U\Lambda U\T \]
level sets are ellipsoids: 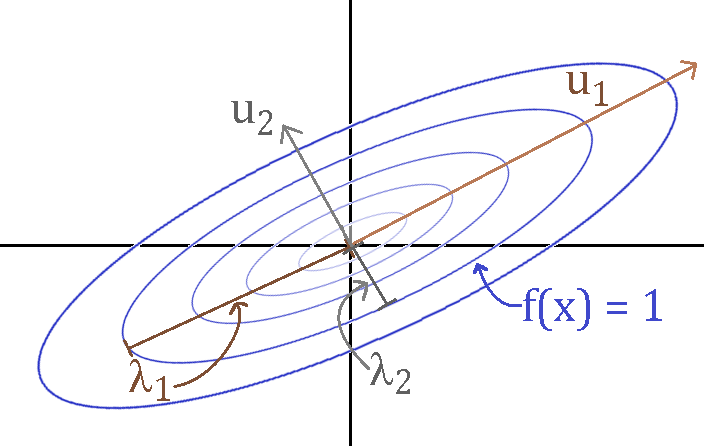
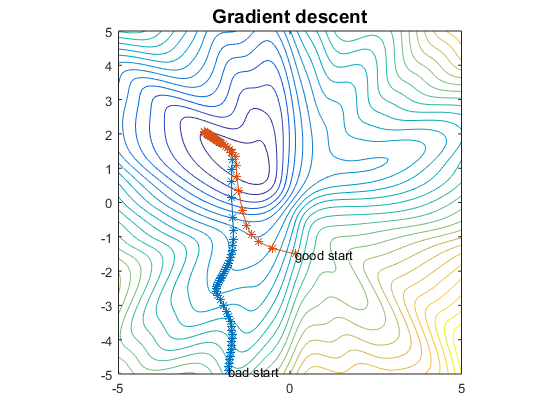
gradient descent from two starting points: 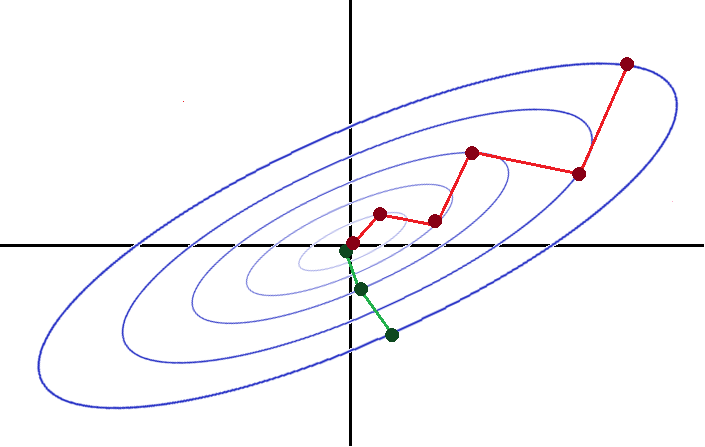
- eigenvectors of \(H\) are principal axes
- eigenvalues are the lengths of the “unit ellipse” axes
Gradient descent zig-zags
Let \(x^1, x^2,\ldots\) be the iterates generated by gradient descent with exact linesearch. Then
\[ (x^{k+1} - x^k)^T (x^{k+2}-x^{k+1}) = 0 \]
Proof: exact steplength satisfies
\[ \alpha^k = \argmin_{\alpha>0} \phi(\alpha):=f(x^k + \alpha d^k), \quad d^k = -\nabla f(x^k) \]
- optimality of step \(\alpha=\alpha^k\)
\[ 0 = \phi'(\alpha^k) = \frac{d}{d\alpha} f(\underbrace{x^k + \alpha^k d^k}_{=x^{k+1}}) = (d^k)^T \nabla f(x^{k+1}) = - \nabla f(x^k)^T \nabla f(x^{k+1}) \]
- because \(x^{k+1}-x^k = \alpha^k d^k\) and \(x^{k+2}-x^{k+1} = \alpha^{k+1} d^{k+1}\)
\[ \nabla f(x^k)^T \nabla f(x^{k+1}) =0 \quad\Longleftrightarrow\quad (x^{k+1} - x^k)^T (x^{k+2}-x^{k+1}) = 0 \]
Condition number
The condition number of an \(n\times n\) positive definite matrix \(H\) is \[ \kappa(H) = \frac{\lambda_{\max}(H)}{\lambda_{\min}(H)}\geq 1 \]
- ill-conditioned if \(\kappa(H)\gg 1\)
- condition number of Hessian influences speed of convergence of gradient descent
- \(\kappa(H)=1\): gradient descent converges in one step
- \(\kappa(H)\gg 1\): gradient descent zig-zags
- if \(f\) is twice continuously differentiable, define the condition number of \(f\) at solution \(x^*\) as
\[ \kappa(f) = \kappa(\nabla^2 f(x^*)) \]
Scaled gradient method
\[ \min_x f(x) \qquad f:\Rn\to\R \]
make a linear change of variables: \(x=Sy\) where \(S\) is nonsingular to get rescaled problem \[ \min_y\ g(y):=f(Sy) \]
apply gradient descent to scaled problem \[ y^{k+1} = y^k - \alpha^k \nabla g(y^k) \textt{with} \nabla g(y) = S\T \nabla f(Sy) \]
multiply on left by \(S\) to get \(x\)-update \[ x^{k+1} = S y^{k+1} = S(y^k - \alpha^k \nabla g(y^k)) = x^k - \alpha^k S S^T\nabla f(x^k) \]
scaled gradient method \[ x^{k+1} = x^k + \alpha^k d^k, \qquad d^k = -\underbrace{S S^T}_{\succ0} \nabla f(x^k) \]
Scaled descent
If \(\nabla f(x)\neq 0\), the scaled negative gradient \(d=-SS^T\nabla f(x)\) is a descent direction \[ f'(x; d) = d^T \nabla f(x) = -\nabla f(x)^T(SS^T)\nabla f(x) < 0 \] because \(D := SS^T\succ 0\)
Recall: a matrix \(D\) is positive definite if and only if
- \(D = U\Lambda U\T\) with \(\Lambda\succ0\) diagonal and \(U\) nonsingular
- \(D = S S\T\) with \(S\) nonsingular
scaled gradient method
- for \(k=0,1,2,\ldots\)
- choose scaling matrix \(D_k\succ 0\)
- compute \(d^k = -D\nabla f(x^k)\)
- choose stepsize \(\alpha^k>0\) via linesearch on \(\phi(\alpha) = f(x^k + \alpha d^k)\)
- update \(x^{k+1} = x^k + \alpha^k d^k\)
Choosing the scaling matrix
Observe relationship between optimizing \(f\) and optimizing its scaling \(g\)
\[ \min_y g(y) = f(Sy) \quad\text{with}\quad x \equiv S y \]
condition number of \(\nabla^2 f(x)\) governs convergence of gradient descent
\[ \nabla^2 g(y) = S\T \nabla^2 f(Sy) S \]
- choose \(S\) such that \(\nabla^2 g\) is well-conditioned, ie, \(\kappa(\nabla^2 g)\approx 1\)
Example (quadratic)
\[ f(x) = \half x^T H x + b\T x + \gamma, \quad \nabla^2f(x) = H=U\Lambda U^T\succ 0 \]
- pick \(S\) such that \(S^T H S = I\), ie, \(S = H^{-1/2}:=U\Lambda^{-1/2}U^T\)
- gives perfectly conditioned \(\nabla^2 g\)
\[ \kappa(S^T H S) = \kappa( H^{-1/2} H H^{-1/2}) = \kappa(I) = 1 \]
Level sets of scaled and unscaled problems
Close to solution \(x^*\), levels sets of
\(\bullet\ f\) are ellipsoids and \(\kappa(f)>1\)
\(\bullet g\) are circles for ideal \(S\) because \(\kappa(g)\approx 1\) 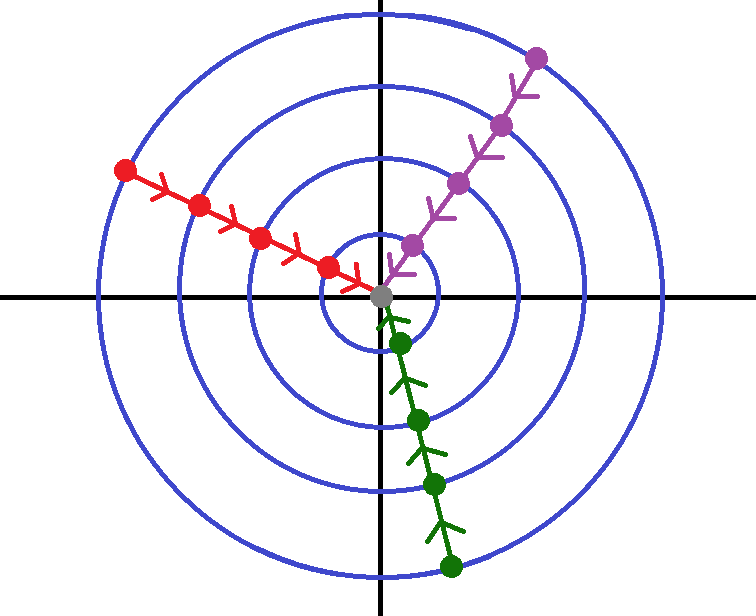
Question
Consider the change of variables \(x = Sy\) to the quadratic function
\[
f(x) = \frac{1}{2} x^T H x,
\]
to obtain the scaled function \[
g(y) = f(Sy).
\]
Which choice of the nonsingular scaling matrix \(S\) will transform the level sets of \(g(y)\) into circles (i.e., result in a perfectly conditioned Hessian for \(g\))?
- \(S = I\) (the identity matrix)
- \(S = H\)
- \(S = H^{-1/2}\)
- \(S = \operatorname{diag}(H)\) (the diagonal part of \(H\))
Common scalings
Make \(S^{(k)}\nabla^2 f(x^{(k)})S^{(k)}\) as well conditioned as possible \[ S^{(k)}(S^{(k)})^T = \begin{cases} (\nabla f(x^{(k)}))^{-1} & \text{Newton ($\kappa = 1$)}\\[1ex] (\nabla f(x^{(k)})+\lambda I)^{-1} & \text{damped Newton} \\[1ex] \Diag\left(\frac{\partial^2 f(x^{(k)})}{\partial x_i^2}\right)^{-1} & \text{diagonal scaling} \end{cases} \]
Gauss Newton
Nonlinear Least Squares
Nonlinear least squares
- NLLS (nonlinear least-squares) problem
\[ \min_{x\in \Rn} \quad f(x):=\half\|r(x)\|_2^2, \quad r:\Rn\to\R^m \quad\text{(typically, $m > n$).} \]
- gradient and residual vector (Jacobian \(J(x)\))
\[ r(x) = \begin{bmatrix} r_1(x) \\ r_2(x) \\ \vdots \\ r_m(x) \end{bmatrix}, \quad \nabla f(x) = J(x)^T r(x), \quad J(x) = \begin{bmatrix} \nabla r_1(x)^T \\ \nabla r_2(x)^T \\ \vdots \\ \nabla r_m(x)^T \end{bmatrix} \quad \]
- reduces to linear least-squares when \(r\) is affine
\[ r(x) = Ax-b \]
Example – localication problem
- estimate \(x\in\R^2\) from approximate distances to known fixed beacons

data
- \(m\) beacons at known locations \(b_1,\ldots,b_m\)
- approximate distances \[d_i = \|x-b_i\|_2 + \epsilon_i\] where \(\epsilon_i\) is measurement error
- NLLS position estimate solves
\[ \min_x \quad \half\sum_{i=1}^m r_i(x), \quad r_i(x) = \|x-b_i\|_2 - d_i \]
- must settle for locally optimal solution
Linearization of residual
- linearize \(r(x)\) about \(\bar x\)
\[ \begin{aligned} r(x) = \begin{bmatrix} r_1(x) \\ r_2(x) \\ \vdots \\ r_m(x) \end{bmatrix} &= \begin{bmatrix} r_1(\bar x) + \nabla r_1(\bar x)^T(x-\bar x) \\ r_2(\bar x) + \nabla r_2(\bar x)^T(x-\bar x) \\ \vdots \\ r_m(\bar x) + \nabla r_m(\bar x)^T(x-\bar x) \end{bmatrix} + o(\|x-\bar x\|)\\[10pt] &= J(\bar x)(x-\bar x) + r(\bar x) + o(\|x-\bar x\|)\\[10pt] &= J(\bar x) x - \underbrace{(J(\bar x)\bar x - r(\bar x))}_{=: b(\bar x)} + o(\|x-\bar x\|) \end{aligned} \]
- pure Gauss Newton iteration: use linearized least-squares problem used to determine \(x^{(k+1)}\)
\[ x^{(k+1)} = \argmin_x \ \half\|J(x^k)x - b(x^k)\|_2^2 \textt{or} x^{(k+1)} = J(x^k) \backslash b(x^k) \]
Gauss Newton as scaled descent
- expand the least squares subproblem (set \(J_k := J(x^k)\) and \(b_k := b(x^k)\)). If \(J_k\) full rank,
\[ \begin{aligned} x^{(k+1)} &= \argmin_x\ \|J_kx - b_k\|^2 \\ &= (J_k^T J_k)^{-1}J_k\T b_k\\ &= (J_k^T J_k)^{-1}J_k^T (J_k x^k - r_k)\\ &= x^k - (J_k^T J_k)^{-1}J_k^T r_k \end{aligned} \]
- interpret at scaled gradient descent
\[ x^{k+1} = x^k + d^k, \qquad d^k:=\underbrace{(J_k^T J_k)^{-1}}_{= D_k\succ0}\underbrace{(-J_k^T r_k)}_{=-\nabla f(x^k)} \]
- Hessian of objective \(f(x) = \half\|r(x)\|^2\)
\[ \nabla^2 f(x) = J(x)^T J(x) + \sum_{i=1}^m \nabla^2 r_i(x) \]
Gauss Newton for NLLS
\[ \min_x \ f(x) = \half\|r(x)\|_2^2, \quad r:\Rn\to\R^m \]
- linesearch on nonlinear objective \(f(x)=\half\|r(x)\|^2\) required to ensure convergence
\[ x^{k+1} = x^k + \alpha^k d^k, \qquad d^k = \argmin_d \ \|J_kd - r_k\|^2 \]
Gauss Newton for NLLS
- given starting point \(x^0\) and stopping tolerance \(\epsilon>0\)
- for \(k=0,1,2,\ldots\)
- compute residual \(r_k = r(x^k)\) and Jacobian \(J_k = J(x^k)\)
- compute step \(d^k = \argmin_d\ \|J_k d + r_k\|^2\), ie, \(d^k = -J_k\backslash r_k\)
- choose stepsize \(\alpha^k\in(0,1]\) via linesearch on \(f(x)\)
- update \(x^{k+1} = x^k + \alpha^k d^k\)
- stop if \(\|r(x^{k+1})\|<\epsilon\) or \(\|\nabla f(x^k)\| =\|J_k^T r_k\|<\epsilon\)